dev-resources.site
for different kinds of informations.
Augmented Reality Application for Autonomous Transport Vehicle
AR (Augmented Reality) has a wide range of uses in many fields such as medicine, entertainment, education or industry. After the Industry 4.0 revolution, it has become one of the focal points of smart factory applications. In this article, I will talk about our approach that applies the augmented reality application to an ATV(Autonomous Transport Vehicle).

Augmented Reality In Business — Forbes
Let’s start ..
First of all, I would like to clarify that this approach was developed for the “Development of Autonomous Transportation Vehicles and HMI-M2M Interfaces for Smart Factories” project financed by TÜBİTAK.
You can access all project on my github repo.
In practise, it’s aimed to augment the sensor data received from the ATV in order to inform the operator and prevent possible hazard. For this purpose, the ATV and laboratory shown in Figure 1 were used.

Figure 1 — ATV and Laboratory Environment
Prior to realize this approach in real environment, it was performed in Gazebo simulation environment shown in Figure 2.
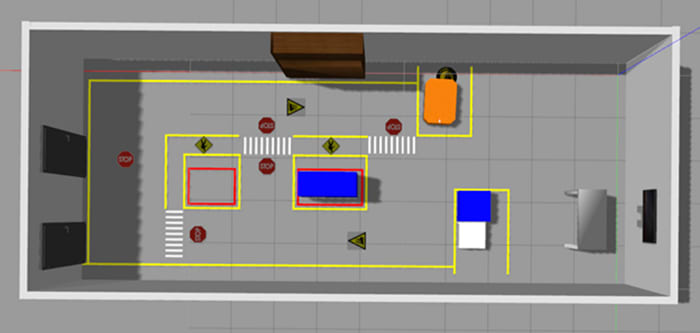
Figure 2 — Gazebo simulation environment
The data used are as follows:
- Position (x,y): left-top side of the screen
- Velocity: left-top side of the screen
- Charge percentage:left-top side of the screen
- Laser(270 degree): red colored circles
- Route: orange colored lines
ROS (Robot Operating System) is located at the center of the architecture shown in Figure 3. It acts as middleware between system components and allows them to communicate easily.
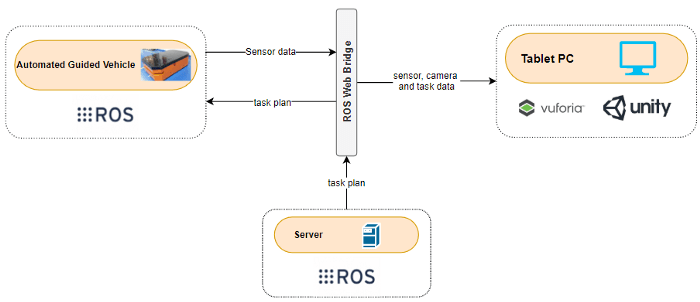
Figure 3 — System Architecture
There are two different camera perspectives that you can switch while ATV is performing its task:
- “ATV Camera” mounted on the front of the ATV.
- “AR Camera” of additional devices such as telephone or tablet.
Results
You can see the screenshots of simulation environment shown in Figure 4.
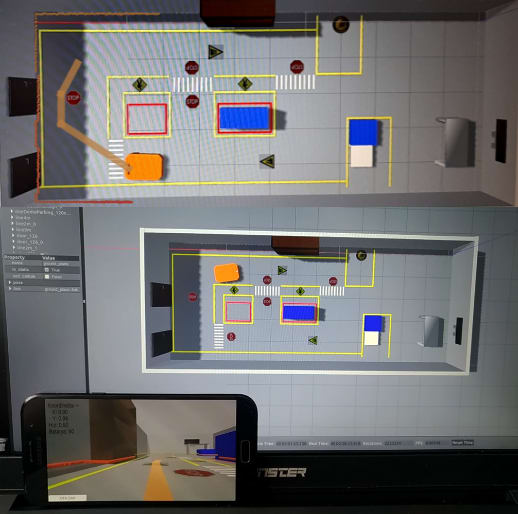
Figure 4 — Gazebo simulation environment
You can also see the screenshots of real environment shown in Figure 5.

You can access the application videos using the URLs given below.
1. Simulation Environment AR Camera
2. Real Environment AR Camera
3. Real Environment ATV Camera
Featured ones: